來自韓國漢陽大學的一段新視頻以輕鬆幽默的方式展示了機器人研究。這段視頻展示了一隻機器手在麥可·傑克森的《Smooth Criminal》音樂中表演月球漫步,整個演示長達 40 秒。這段由博士生裴志勳(Ji-Hun Bae)在機器人認知與操作實驗室(RoCogMan Lab)發佈的視頻,特別展示了 Tesollo DG-5F 機器手如何優雅地滑動手指,模仿這一傳奇動作。視頻的創作者將其描述為「受 KAIST 人形機器人月球漫步啟發的學術惡搞」,而 KAIST 的系統則是通過機器腿來實現這一動作,這次的演示則幽默地用機器手指來重現。視頻描述中指出,這一展示的目的是要表明「不僅是人形機器人,連機器手指也能跳舞」。
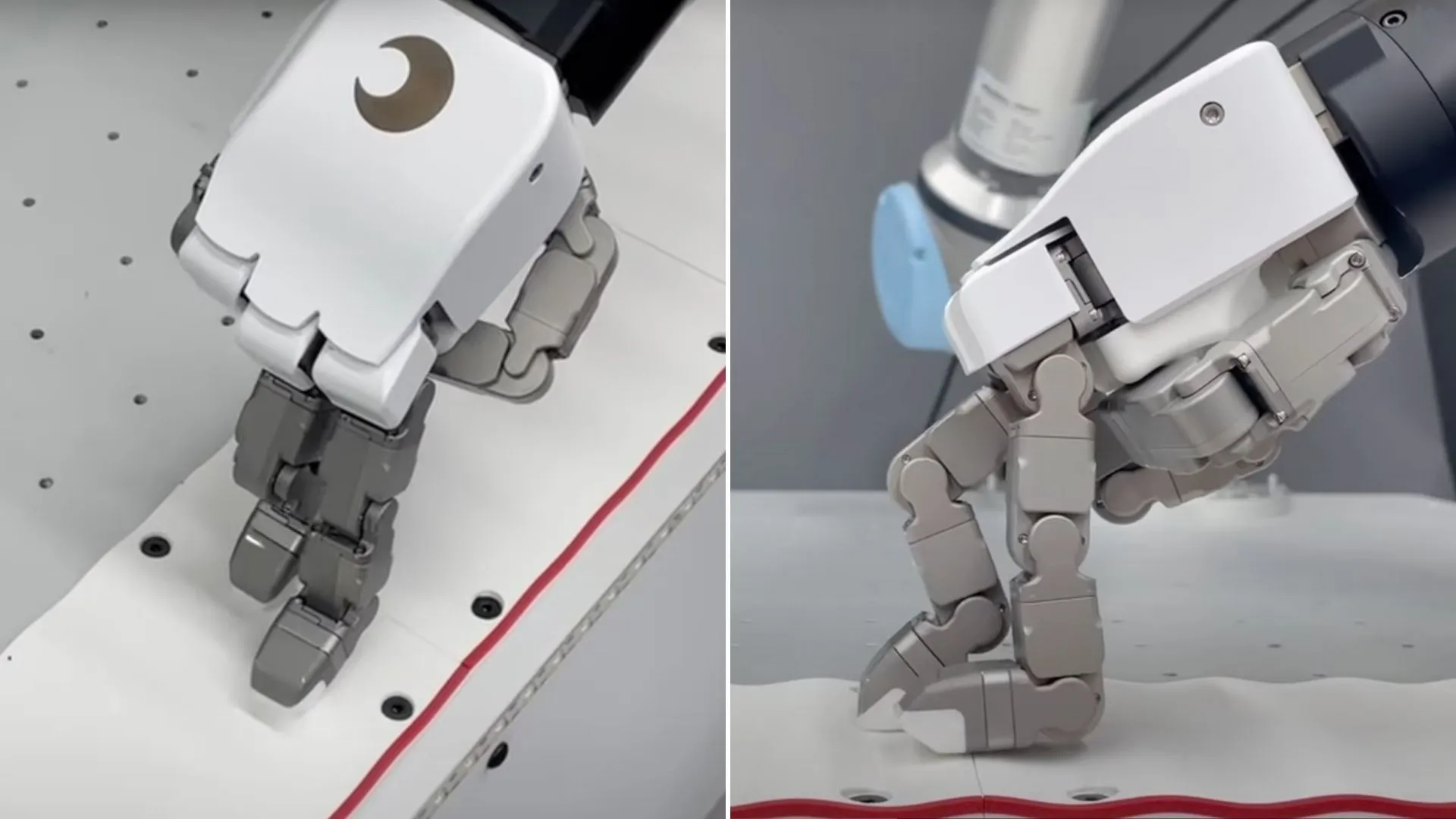
漢陽大學的 RoCogMan 實驗室以其在機器人認知、操作及醫療機器人方面的研究而聞名。這段視頻不僅是一個幽默的回應,也是一個技術展示,隨著韓國科學技術院(KAIST)的人形機器人演示而推出。在這段視頻中,Tesollo DG-5F 機器手安裝在一個機器臂上,兩根手指在桌面上隨著《Smooth Criminal》的節拍平滑滑動。這種同步的動作突顯了該機器手驚人的靈活性和控制範圍,使其看起來就像是手指在音樂中舞動。
除了幽默之外,這一展示有效地展示了 DG-5F 的精細運動控制和關節協調能力,這些特性使其適合於研究、工業和醫療機器人的高精度操作任務。Tesollo DG-5F 是由 TESOLLO Inc. 開發的一款完全驅動的五指類人機器手,擁有 20 個自由度(DoF)。每個關節都可以獨立控制,允許進行複雜且協調的手部動作,這些動作與人手非常相似。DG-5F 的設計基於成年男性手的比例,支持各種握持模式,如捏、用力和精確握持,使其能夠處理從精細操作到堅固握持的各種任務。此外,選配的高精度力傳感器安裝在手指尖,提供實時觸覺反饋,支持如滑動檢測和自適應力控制等功能,這對於與動態環境的互動至關重要。
DG-5F 由輕質高強度材料製成,旨在為工業和研究應用提供穩健的性能。其 ROS2 兼容性使其能夠與現有的機器人系統和模擬器無縫集成,成為在基於人工智能的操作、人機互動及靈巧控制研究中的多功能平台。儘管這隻月球漫步的機器手看似是一個輕鬆的實驗,但它反映了 RoCogMan 實驗室更廣泛的使命:開發能夠執行複雜現實任務的機器人。該實驗室的研究涵蓋了物體感知、基於視覺的控制以及醫療機器人技術,包括經顱磁刺激(TMS)系統和為截肢者開發的義肢手。在這個通常以功能性和正式性為特點的領域,漢陽大學 RoCogMan 實驗室的這次表演以 40 秒的時長提醒人們,即使是機器手指也能夠展現舞蹈的魅力。
