一項新的機器人技術突破可能會改變機器的運動、適應和與世界互動的方式,這一切都源自於模仿生物本身。
瑞士洛桑聯邦理工學院(EPFL)的工程師們開發了一種可編程的泡沫晶格,這種設計在機器人身體中融合了柔軟性和剛性。受動物肌肉骨骼系統的啟發,這一新設計使機器人能夠以更高的精度彎曲、扭轉和承載重量。
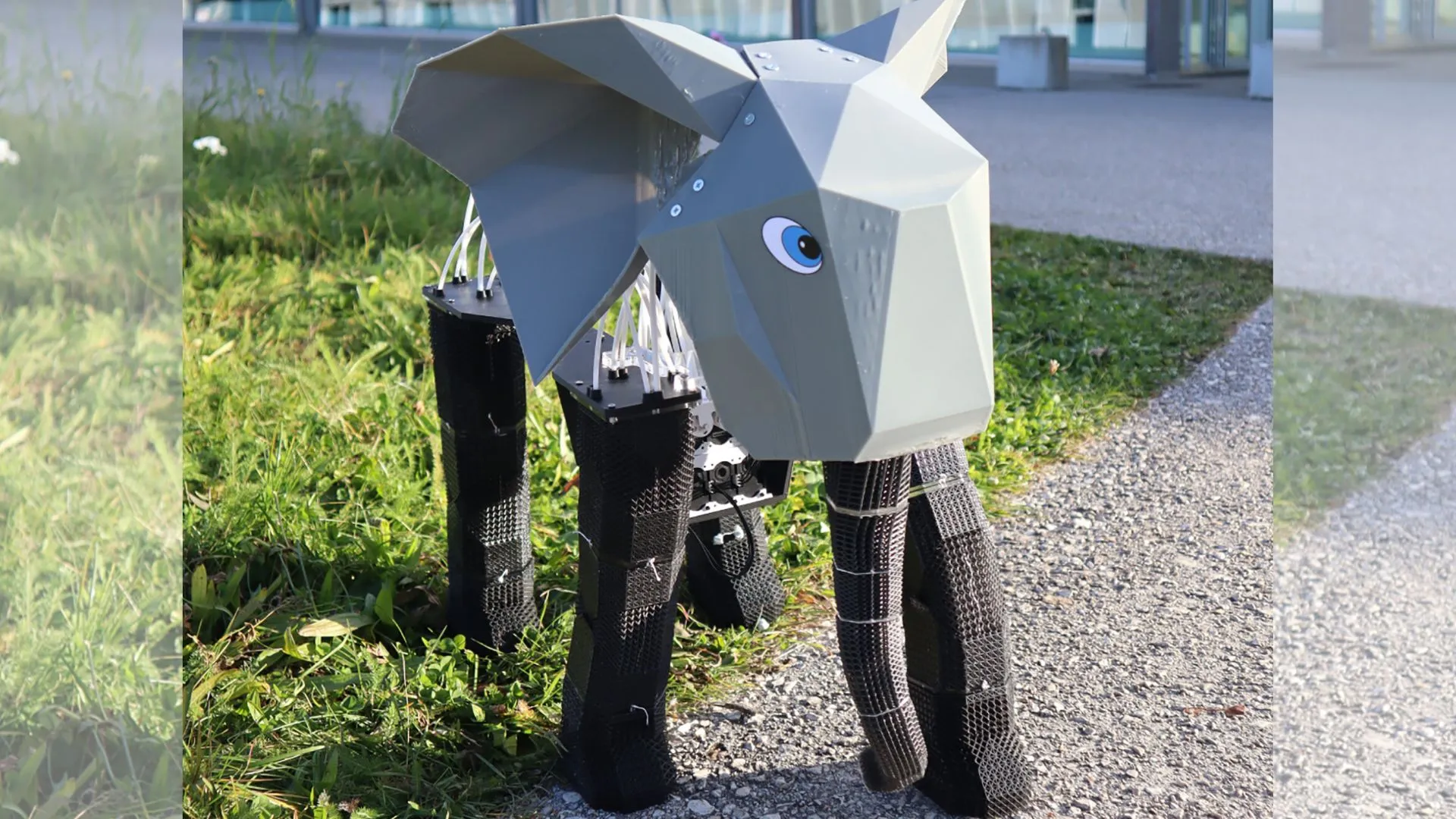
為了展示這一系統,研究人員建造了一個靈感來自大象的機器人,能夠實現如同真實生物般的動作,包括扭轉的鼻子和關節四肢。
這項創新來自EPFL的計算機器人設計與製造實驗室(CREATE),由研究員Josie Hughes領導。他們的可編程晶格結構使用一種簡單的泡沫材料,分為多個“單元”,每個單元可以採取不同的形狀和方向,這些單元構成了機器人機械性能的基礎。
“我們利用可編程晶格技術建造了一個受肌肉骨骼啟發的大象機器人,擁有可扭轉、彎曲和旋轉的柔軟鼻子,以及更剛性的髖關節、膝關節和足部關節,”博士後研究員Qinghua Guan表示。“這表明我們的方法為設計前所未有的輕量化、適應性強的機器人提供了一個可擴展的解決方案。”
團隊創建了兩種類型的單元:體心立方(BCC)和X-立方。每種類型提供不同的剛性和變形特性。但突破在於能夠在空間中持續地混合和修改這些單元,就像動物的肌肉過渡到肌腱和骨頭一樣。
研究人員還可以沿軸旋轉、移動或重疊這些單元,從而引入第二個編程維度,這一控制方法解鎖了數百萬種幾何組合。單個晶格立方體如果有四個重疊的單元,可以生成約四百萬種配置;如果有五個單元,總數則會激增至超過七千五百萬。
通過調整形狀和位置,團隊在機器大象中構建了多種類型的關節:用於足骨的滑動關節、膝蓋的彎曲關節和用於腳趾運動的複雜雙軸關節。不同的晶格區域使鼻子的彎曲、扭轉和旋轉動作得以實現,同時保持各部分之間的平滑過渡。
這種機器人的泡沫晶格為材料整合和流體運動開辟了新的可能性。Hughes認為,這一技術的潛力不僅限於運動本身。“就像蜂窩一樣,這種晶格的強度與重量比可以非常高,從而實現非常輕便和高效的機器人,”她表示。“開放的泡沫結構非常適合在流體中運動,甚至有潛力在結構中包含其他材料,如傳感器,以提供進一步的智能。”
這項工作為未來具備內建智能、運動範圍和結構多樣性的軟剛性機器人鋪平了道路,所有這些都來自於可定制的泡沫骨架。該研究已發表於《Science Advances》。
日本電話卡推介 / 台灣電話卡推介
一㩒即做:香港網速測試 SpeedTest HK
