機器人能夠搬運重物,並且不知疲倦地移動箱子或在生產線上組裝零件。然而,當要求機器人執行一些簡單的人類任務,比如轉動門把、打開罐子或旋卸燈泡時,它們常常顯得笨拙。精確操作,尤其是在狹窄或不可預測的空間中,對於機器人來說一直是一個重大挑戰。直到現在,這一限制一直阻礙著設計能夠在工廠和日常環境中無縫轉換的機器。
耶魯大學的科學家們找到了解決這一長期問題的方法,使機器人能夠更輕鬆高效地處理更複雜的動作。他們的創新有望縮短工業機器人與需要在家庭、醫院和災區等地靈活適應的機器之間的差距。這一進展不僅能提升機器人的操作效率,還能讓其在各種環境中更好地適應。
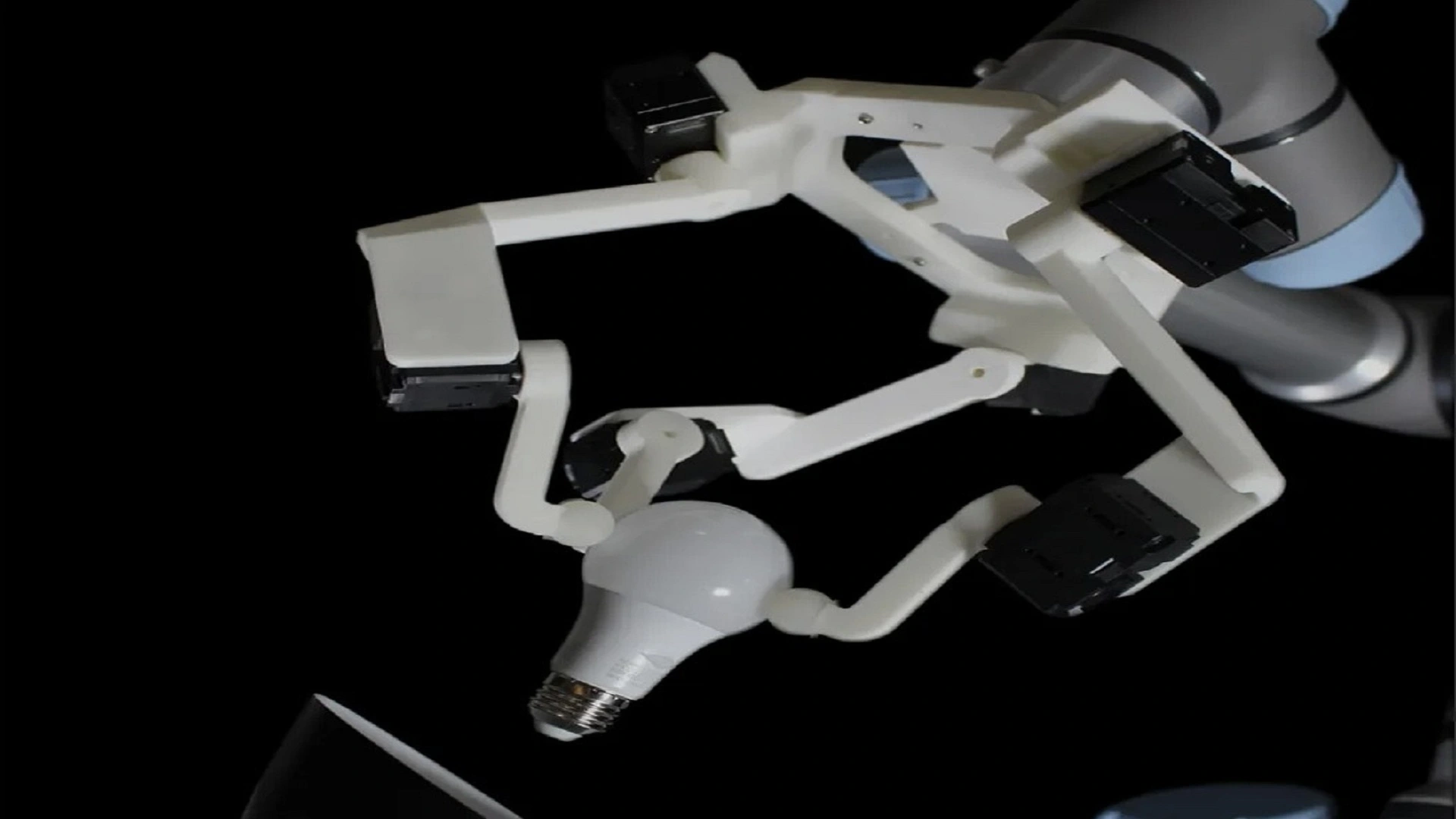
耶魯大學的研究團隊在阿倫·道拉的實驗室中開發了一種名為「斯芬克斯」的機器手,專門解決了這一問題。這種球形機制能夠在所有三個軸上抓取和旋轉物體,將傳統手腕和夾具的功能合併為一個簡約的設計。該設計不需要複雜的傳感器或攝像頭,因為球形機制使其能夠自動進行滾動、俯仰和偏航運動。
根據該研究的主要作者、博士候選人瓦茨爾·帕特爾的說法,這種設計顯著提高了機器人在狹小或雜亂空間中的操作能力。例如,機器人現在可以輕鬆地在狹窄的衣櫃中擰入燈泡,這在以前是非常困難的任務。這種創新不僅提升了機器人的效率,還使其在執行任務時需要的空間更小,這在實際應用中將大大提高靈活性。
除了具體的應用場景,這一進展使機器人技術朝著能夠在複雜和無結構環境中自如導航的長期目標邁進。這些環境中,機器人無法確定物體的具體位置,它們需要根據環境及物體的變化進行調整。帕特爾指出,現今的機器人技術正是朝著能夠適應這些變化的方向發展,這項研究的成果發表在《自然機器智能》期刊上,為未來的機器人技術提供了新的思路和可能性。
想睇更深入嘅 AI 模型與工程科技報道?
前往 The Base Principle 繁體中文 AI 新聞 →