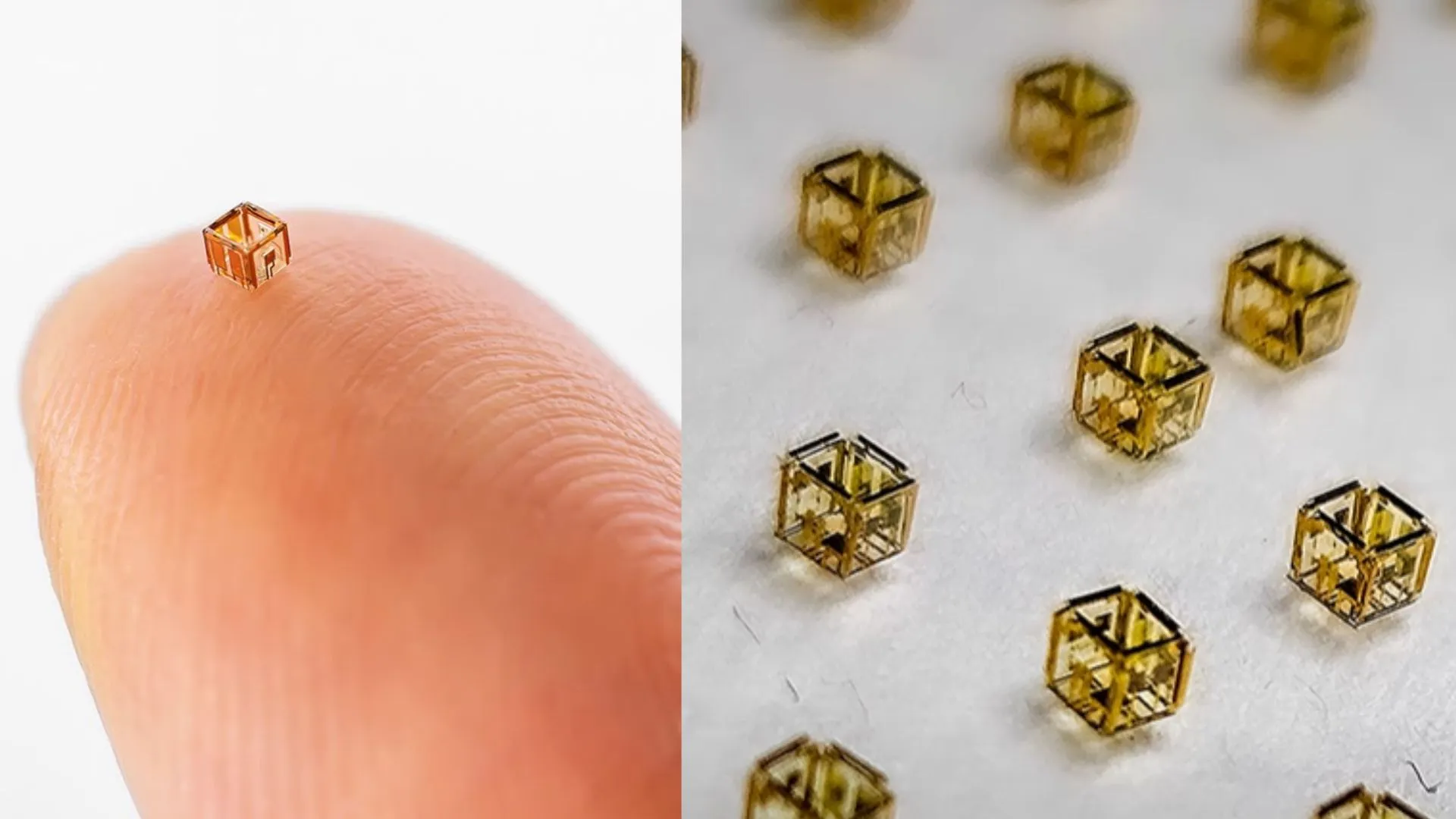
在德國的Chemnitz科技大學,科學家們邁出了智能機器人集體的重要一步,成功研發出新一代的自主微型機器人。這些被稱為「智能小裝置」(smartlets)的微型機器人,每個只有一毫米寬,具備了通信、對光的反應能力,並能在水中進行協調行動。該大學的材料、建築和納米薄膜集成研究中心(MAIN)的研究人員,利用靈活的、受到摺紙啟發的材料來開發這些設備。
這些智能小裝置能夠自我摺疊成微小的空心立方體,每個單元都具備內部和外部功能。這樣的表面積支持太陽能電池、內置處理器以及光學信號系統的安裝。與早期需要笨重外部控制的微型機器人不同,這些智能小裝置配備了集成的光伏電池和硅微芯片。每個單元還包括微型LED和光電二極管,實現光學通信。MAIN的科學主任及研究的共同作者Oliver G. Schmidt教授表示:「我們首次展示了一個獨立的微型機器人平台,該平台不僅能在水中感知和移動,還能以完全可編程和自主的方式與其他微型機器人互動。」
這些立方體利用產生氣泡的引擎來推進自身,從而創造浮力。在水中,它們可以根據需要上升或下降。此外,它們還能發出光脈衝,向附近的智能小裝置發送指令,實現同步移動和集體反應。利用光來同時提供能量和通信是一項突破性進展。MAIN的研究小組領導者Vineeth Bandari博士表示:「使用光作為能量和信息的想法,開啟了一種緊湊且可擴展的方式來創建分佈式機器人系統。」這些機器人依賴一個「無線通信循環」,消除了對外部磁鐵、天線或相機的需求。
每個智能小裝置都能根據其微芯片上編程的邏輯來解讀信號。工程師們將這些微小的硅芯片稱為lablets,通過柔性粘合技術附著在摺紙層上。這個系統實現了去中心化控制,為機器人集體的適應和協作奠定了基礎。共同作者John McCaskill教授強調了分布式智能的重要性。他表示:「我們仍然距離創造人工生命還有很長的路要走,但我們開始看到分布式智能和模塊化硬體如何構建出開始模仿生物集體的適應性和交互行為的系統。」
這些設備因為是無繩的且生物相容,研究團隊看到了它們在醫學和環境監測中的潛在應用。未來,它們可能協助進行水質檢查、微創診斷或探測被限制的生物系統。研究人員還設想了在軟體機器人和分散式感測網絡中的應用。Lee博士表示:「我們正在探索增加自主性的方式,通過添加化學和聲學感測模塊。這些智能小裝置未來可能演變成多功能平台,能夠在複雜的流體環境中進行感知、行動和適應。」
團隊想像未來的集體將類似於數字生物,有專門的單元來處理感知、移動或通信。就像共生海洋生物中的細胞一樣,協調運作的智能小裝置能實現單一單元無法達到的行為。通過將能量、邏輯和通信整合到如此小的系統中,Chemnitz的研究人員為未來可能在液滴、組織或微型生態系統中自我組織的機器人集體奠定了基礎。這項研究已發表在《Science Robotics》期刊上。
