由東京大學 JSK Robotics Laboratory 的工程師們設計的一款新型開源雙足機器人 MEVITA,旨在解決現有 DIY 平台所面臨的常見問題。MEVITA 的設計強調了強度和易於組裝的特性,並選用最少數量的零件,所有零件均可在網上獲得,這使得高級機器人技術變得更加易於接觸。隨著開源雙足機器人平台的興起,越來越多的人可以開發這些機器人並分享知識,而不必依賴商業產品。然而,開源機器人社區面臨著一些權衡。許多可接觸的機器人平台使用 3D 列印零件,這通常導致設計脆弱,難以擴展。相反,金屬設計雖然耐用,但零件過多,組裝困難,且零件在網上不易找到。
為了解決這些問題,研究人員開發了 MEVITA,一款可以完全由電子商務平台提供的零件組建的開源雙足機器人。該團隊使用了板金焊接技術來實現雙足機器人的基本功能設計。這種技術能夠將複雜的形狀合併為一個單一的零件,大幅減少所需的獨立零件數量。因此,該機器人的組裝對任何人來說都變得更加容易。MEVITA 的設計專注於簡約和一體化的結構,除了對稱零件外,機器人僅由 18 個獨特的金屬組件組成,其中四個組件使用板金焊接製作,成為其一大特色。
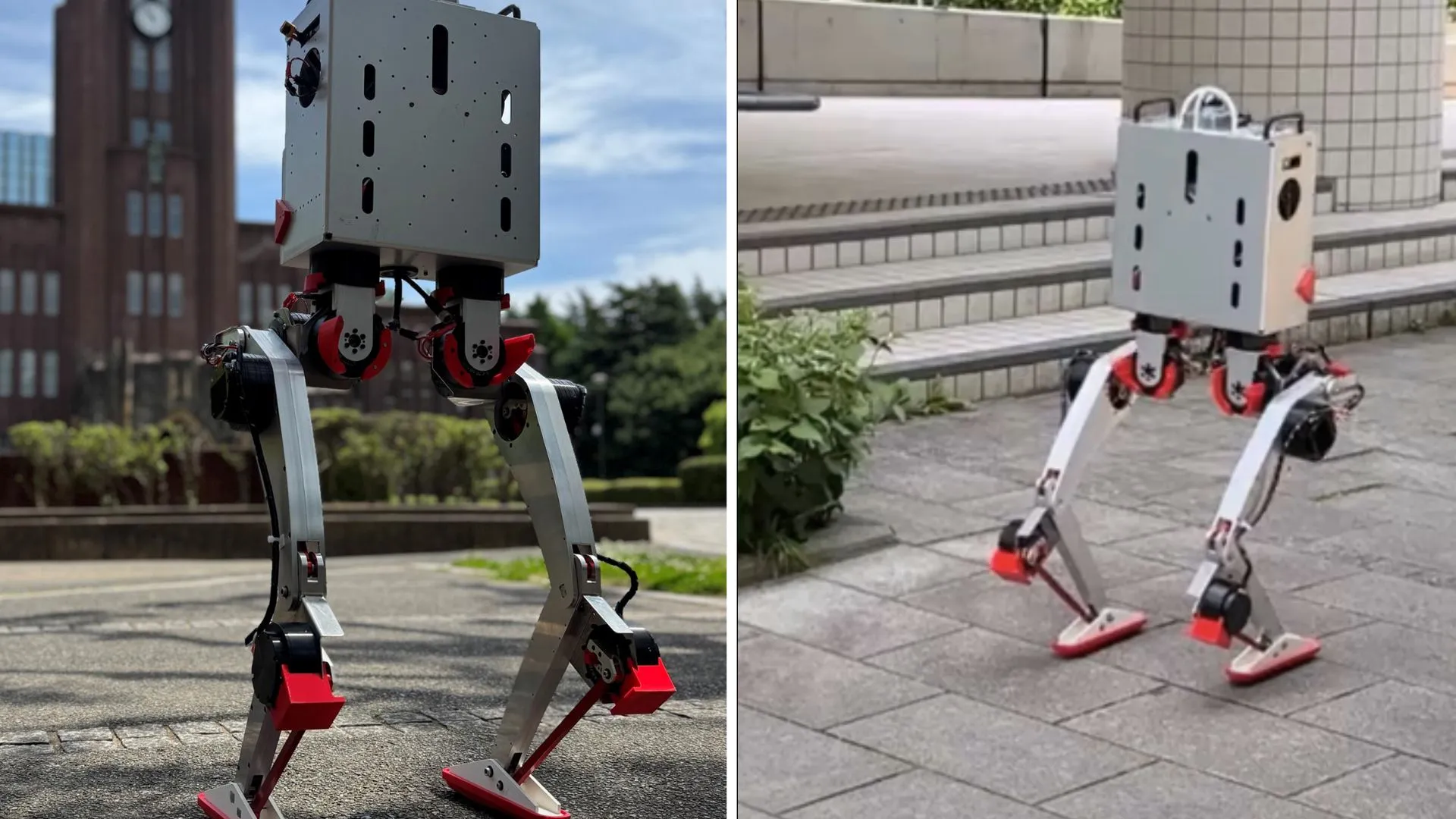
MEVITA 的控制系統同樣簡化,利用現代 AI 技術來實現最佳性能。控制策略通過增強學習在名為 IsaacGym 的模擬環境中訓練,這些訓練後的行為在另一個模擬環境 MuJoCo 中進行驗證,然後通過標準的 Python 腳本部署到物理機器人的硬件上。這種模擬到現實的轉移方法被證明極其有效,機器人能夠在各種具有挑戰性的環境中行走,包括不平坦的室內地形、草地、泥土表面、混凝土瓷磚和緩坡。雙足機器人的電路配置旨在提高控制效率和安全性,研究指出“伺服電機通過兩個 CAN-USB 接口連接到 PC,系統配備無線緊急停止按鈕、電源繼電器、二極體以及 LiDAR/IMU。”
為了提高安全性,系統包括無線緊急停止功能,允許從距離立即關閉設備。此外,電源繼電器和二極體的集成有助於管理電流流動和保護系統,並配備 LiDAR 和慣性測量單元(IMU),提供關鍵的傳感器數據以支持導航和平衡。這個項目的目的是降低雙足機器人開發的門檻,通過將整個平台,包括硬件、軟件和訓練環境開源,鼓勵新的研究。這將使研究人員、學生和愛好者能夠建造、創新並塑造雙足機器人的未來。
