iRonCub3 的創作者們近日推出了一種新的控制方法,這種方法能夠幫助這款噴氣動力的人形機器人保持穩定並在模擬中遵循飛行路徑,這標誌著在將行走機器人與空中移動性結合方面邁出了重要一步。這項研究的標題為《統一多速率模型預測控制用於噴氣動力人形機器人》,提出了一種模型預測控制(MPC)框架,該框架明確建模了機器人的飛行動力學以及其噴氣引擎的較慢非線性行為。研究者們在 iRonCub 平台上使用 Mujoco 模擬驗證了這一方法,並報告了強大的擾動抑制能力和穩定的軌跡跟蹤效果。
這篇論文的核心創新在於多速率 MPC 設計,該設計調和了人形機器人關節執行器和噴氣引擎之間的不同響應速度。控制器使用線性化的重心動量模型來表示機器人的飛行動力學,並將其與二階非線性模型相結合,該模型針對噴氣推進系統進行增強。這一綜合預測模型使控制器能夠以較高的更新速率計算關節指令,同時以較低的速率向噴氣引擎發出油門指令,從而使每個執行器與其物理能力相匹配。研究人員指出,這種統一的多速率架構改善了響應性和穩定性,防止較快的子系統受到較慢子系統的拖累,並將噴氣引擎的動力學直接嵌入預測範圍中。
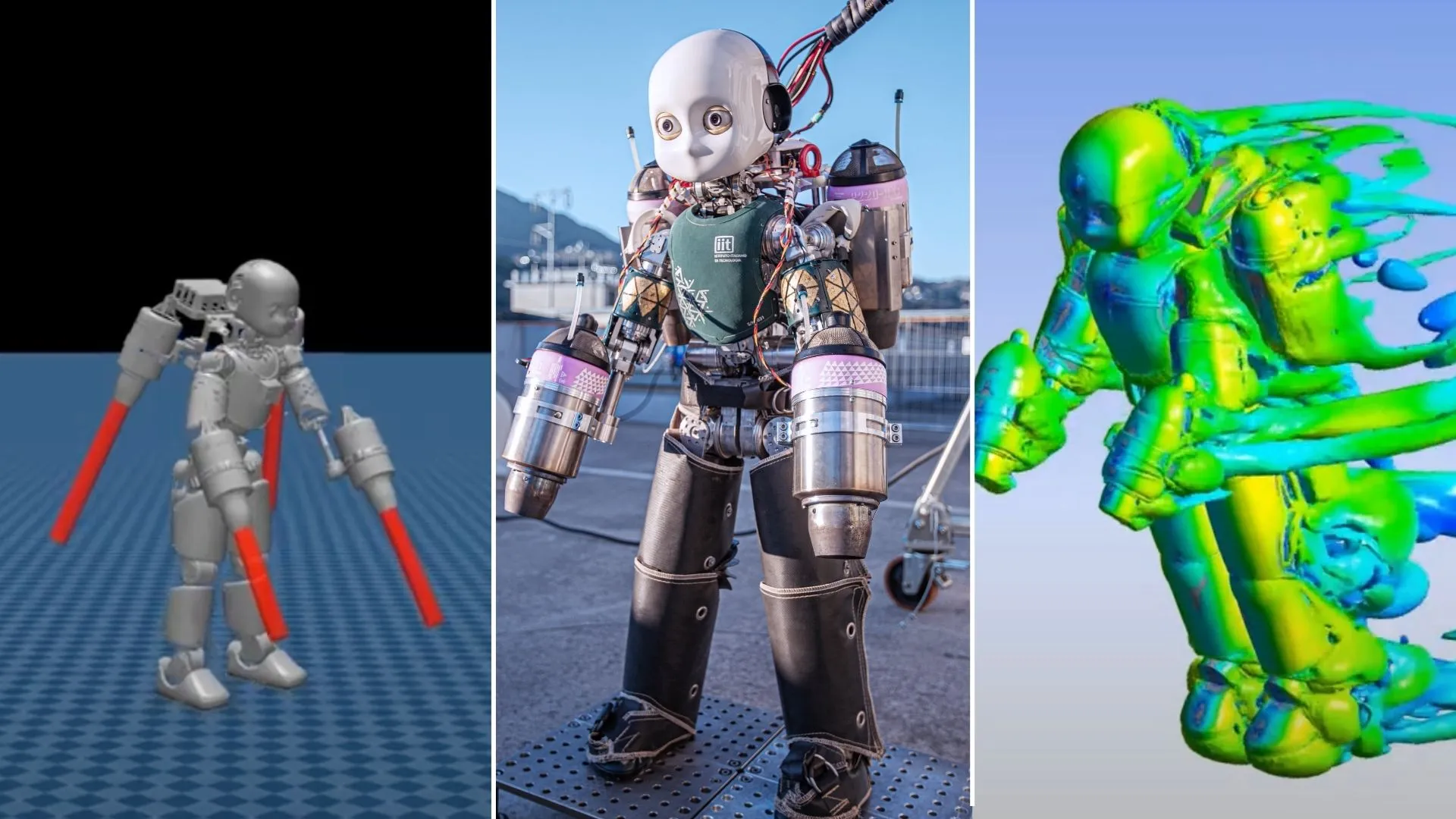
在 MuJoCo 中進行的驗證中,噴氣動力學由一個訓練神經網絡來模擬,以捕捉複雜的引擎行為。團隊運行了多種場景,包括向後推動以誘導向前俯仰和側向力量造成的翻滾,結果發現控制器在兩種情況下都能穩定機器人。軌跡跟蹤使用了兩種參考路徑進行評估。一種是平滑的最小驚厥軌跡,另一種則是更具侵略性、高加速度的路徑。在平滑運動下,控制器準確地跟蹤了機器人的質心在水平方向上的位置並保持了方向,僅在垂直位置上有一個小的穩態偏移。在動態軌跡下,跟蹤誤差如預期增加,但機器人仍然保持穩定,並跟隨了路徑的整體形狀。iRonCub 的模擬代碼已在 GitHub 上公開,允許其他研究人員重現並基於這些結果進行進一步的研究。
這項工作來自於意大利熱那亞技術研究院的 iRonCub 項目所取得的實質性進展。經過近十年的發展,iRonCub3 平台於今年夏季成功起飛,四個噴氣引擎將這個人形機器人抬升約 50 厘米,持續數秒。實驗室主任 Daniele Pucci 將這一努力視為一項超越學術的挑戰,他指出:“我們希望為未來的某些獨特貢獻做出努力。” 他提到機器人在災難響應中可能的角色,能夠飛越障礙物,然後在地面行走和操作物體。評論人士也看到這項研究在飛行人形機器人之外的更廣泛價值。IEEE Spectrum 的 Evan Ackerman 指出,推力估算和空氣動力學補償算法對於其他定向推力車輛(包括 eVTOL 設計)有直接應用,而像 iRonCub 這樣的旗艦項目有助於吸引和留住人才。
這項研究的探索性機器人項目不僅能推動技術進步,也能激發該領域的熱情,這一點在 Pucci 的話中得到了充分體現。
