康奈爾大學的工程師們開發了一種機器人系統,其行為更像是流動的材料,而非傳統機械,這使得小型機器人羣體能夠在無需集中控制的情況下移動、重塑和適應。這個系統名為 Cross-Link Collective,由數十個狹窄的機器人模塊組成,這些模塊能夠利用弱的魔術貼連接彼此。單獨而言,這些機器人在困難的地形中移動緩慢且掙扎不已。然而,當它們彼此連接時,便開始作為一個協調的集體行動,能夠克服障礙和坡度。
研究人員表示,這些機器人依賴於“機械智能”,而非先進的計算或通信系統。它們的物理互動使得協調運動自然地出現,模塊在移動的同時不斷連接和斷開。
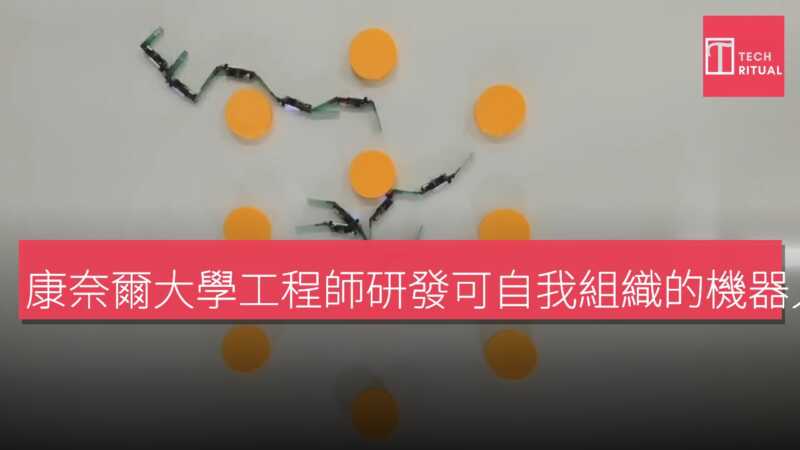
Cross-Link Collective 系統展現出高度的適應性
康奈爾大學電氣和計算機工程副教授 Kirstin Petersen 表示:「系統的智能轉移到了機器人的形狀及其物理互動上,而非依賴明確的計算和通信。」每個機器人的長度約為 200 毫米,寬度為 20 毫米。內部的小型電動機驅動模塊不斷在“I”形和“U”形之間切換,產生力量推動其在表面上移動。兩端的弱魔術貼使得相近的模塊在移動過程中能夠暫時附著和分離。
當這些機器人形成鏈條時,其行為會發生顯著變化。在傾斜的表面上,連接的模塊比單獨的單元移動得更可靠,因為單獨的單元常常因為方向問題而停滯。在充滿障礙的環境中,這些鏈條的行為類似於流動的材料。連接形成以維持團隊的凝聚力,但在必要時也會斷開以避免卡住。主要作者 Danna Ma 表示:「即使某個模塊的電池受損或因其他原因失效,系統依然能保持功能,因為它能夠適應。它是冗餘的,並不依賴於任何單一模塊。」
研究人員指出,這種設計使得系統即使在某些機器人停止運作的情況下仍能保持運行。由於沒有中央控制器指揮運動,集體能夠動態地重新組織。團隊還展示了添加少量感應器能夠改善協調性。當一個機器人與集體分離時,它會發出可聽見的嗡嗡聲,促使附近的模塊減慢速度,給予孤立機器人時間重新連接。
Ma 表示:「沒有集中式的感測或控制。每個模塊可以根據其被搖晃的程度推斷自己是否失去與集體的接觸,然後利用可聽見的嗡嗡聲來減慢附近模塊的速度,以便追趕上來。就這麼簡單。」最初,喬治亞理工學院設計了這些機器人模塊。康奈爾團隊經過多年的測試和統計分析,對系統進行了改進,以提高機器人連接和共同移動的效率。
Cross-Link Collective 的靈感來自於活性凝膠,這種材料的分子鍵結不斷形成和斷裂,同時保持整體結構。研究人員相信,這項工作有助於推進柔性機器人技術和設計用於在不可預測的現實環境中運作的系統。Petersen 指出:「我們開始思考可以將什麼編碼到系統的物理特性中,因為機器人日益應用於高度不可靠和動態的現實場景。」該研究發表於《科學機器人學》期刊。
📬 免費訂閱 TechRitual 科技精選
按「免費訂閱」即同意收到 TechRitual 嘅科技資訊及優惠。可隨時取消訂閱。
