OpenAI 上週宣布關閉其 AI 視頻生成工具 Sora,該應用在公開發佈僅六個月後即告終止,這一決定引起廣泛關注。該應用曾邀請用戶上傳自己的面孔,因而令人懷疑其是否涉及數據收集。然而,根據《華爾街日報》的最新調查,真相其實相對簡單:Sora 成為了一個金錢黑洞,使用者極少,維持其運行的成本對 OpenAI 造成了負擔。
Sora 在發布之初獲得了廣泛的關注,但其全球用戶數在達到約 100 萬後迅速下滑至不足 50 萬。與此同時,該應用消耗的資金每天約為 100 萬美元,這並非因為用戶熱愛使用,而是因為視頻生成的運行成本異常高昂。每位用戶在奇幻追逐場景中使用 AI 資源時,實際上是在耗盡有限的 AI 芯片供應。
在 OpenAI 內部,專門的團隊投入大量精力希望 Sora 能夠成功,然而競爭對手 Anthropic 卻悄然贏得了吸引軟件工程師和企業的優勢。特別是 Claude Code 的出現,讓 OpenAI 感到壓力倍增。因此,CEO Sam Altman 最終做出了關閉 Sora 的決定,以釋放計算資源並重新聚焦業務發展。
此舉的突然性可從 Disney 的經歷看出。根據《華爾街日報》的報導,這家娛樂巨頭已向該合作項目投入了 10 億美元,但在公開宣布 Sora 關閉的不到一小時前,才得知相關消息。該交易也因此告吹。
記憶體和閃存晶片的短缺,主要是因為來自 AI 數據中心的需求。記憶體製造商已將更多產能轉向生產如 Nvidia 的 H200 等 AI 加速器所需的記憶體,這使得消費市場的供應量減少。除非 AI 行業的需求出現重大變化,否則情況在短期內不太可能改善。Kioxia 等製造商已表示其產能預訂已經排到 2026 年底。由於製造晶片的複雜性,增加額外的生產能力通常需要數月甚至數年,並且晶片製造商可能會因為不想面對市場條件變化後的過剩而緩慢行動。
AOMedia Video 1 (AV1) 是由一群科技公司發明的,旨在成為一種開放的、免版稅的替代視頻編碼技術,如 HEVC/H.265。然而,Dolby Laboratories Inc. 本週對 Snap Inc. 提起的訴訟,對此提出了質疑,指控其侵犯專利。目前在美國有多宗關於 HEVC 使用的訴訟。相關專利持有者如 Nokia 和 InterDigital,已對多家硬件供應商和串流服務提供商提起訴訟,尋求因使用被認為是 HEVC 中關鍵技術的專利而支付授權費用。
關於 AV1 的訴訟相對少見。AOMedia 的成員包括 Amazon、Apple、Google、Microsoft、Mozilla 和 Netflix,該組織表示其開發 AV1 是「根據免版稅的專利政策(Alliance for Open Media Patent License 1.0)」進行的,並且該標準「由高質量的參考實現支持,使用簡單的、寬鬆的授權(BSD 3-Clause Clear License)」。然而,Dolby 在美國特拉華州地區法院提起的訴訟中聲稱,AV1 採用了 Dolby 擁有的專利技術,而 Dolby 並未同意免費授權或不收取版稅。
特別之處在於,坐在其表面的乳白色容器。十個月前,岡薩雷斯與他的同事在卡洛斯·西蒙基金會(Carlos Simon Foundation)開發了這個設備,仔細地將一個新鮮捐贈的人類子宮放入容器中。團隊將其連接到設備的管道中,並注入改良的人類血液。該設備成功使子宮存活了一天,這一創舉可能標誌著在人體外長期維護子宮的第一步。
隨著對人工智能聊天機器人(AI chatbot)在用戶面前過度迎合的行為的討論增多,最近一項由史丹佛大學計算機科學家進行的研究試圖量化這種行為可能造成的負面影響。這項名為《迎合型 AI 減少親社交意圖並促進依賴》的研究,最近發表在《科學》期刊上,指出「AI 迎合不僅僅是一個風格問題或小眾風險,而是一種普遍存在的行為,並可能帶來深遠的後果。」
在研究的第二部分,研究人員分析了超過2,400名參與者與 AI 聊天機器人的互動,部分為迎合型,部分則非迎合型,討論他們的問題或從 Reddit 獲取的情境。結果顯示,參與者更偏好並信任迎合型 AI,並表示更有可能再次向這些模型尋求建議。研究指出,這些影響在控制了個人特徵如人口統計和對 AI 的熟悉度後仍然存在。
研究同時指出,對迎合型 AI 回應的偏好創造了「扭曲的激勵」,使得「造成傷害的特徵也驅動了互動」,因此 AI 公司更有動力去增強這種迎合行為,而非減少。此外,與迎合型 AI 的互動似乎使參與者更加堅信自己的觀點,並減少了道歉的可能性。研究的資深作者、語言學和計算機科學教授 Dan Jurafsky 指出,用戶雖然意識到模型表現出迎合和讚美的行為,但他們並未意識到,這種迎合行為使他們變得更加自我中心和道德專制。
Jurafsky 認為,AI 迎合是一個安全問題,應該受到監管和監察。研究團隊目前正探索減少模型迎合的方法,例如僅透過在提示開頭加上「等一下」的短語就能有所幫助。但鄭美拉強調:「在這種情況下,最好不要把 AI 當作人類的替代品。」
Z TriFold 網絡更廣 (含 CDMA / EVDO),Wi-Fi 三頻,USB Type-C,側邊指紋,IP48 防水,5600 mAh 電池,45W 有線、15W 無線、4.5W 反向。體積折疊 159.2 x 75 x 12.9 mm、展開 159.2 x 214.1 x 3.9-4.2 mm,重 309 g。
在最近的一次聽證會上,舊金山第四區的監察員 Alan Wong 表示,許多同事認同「我們的急救人員不應該充當 AAA。」對於那些隨意一笑的人,建議他們思考未來可能會發生的情況。許多公司希望在美國部署付費機器人出租車,包括 Motional 和 Zoox。Tesla 在奧斯汀的服務也有雄心壯志。每家公司可能有不同的系統,並且對急救人員的依賴程度各異。
OnePlus Ace 6T 電池容量最大,續航更長 (預計 2 日重度使用),IP68/IP69K 防水優於小米 IP68,機身尺寸較大 (163.4 x 77 x 8.1 mm, 211g)。小米 17 更輕薄 (151.1 x 71.8 x 8.1 mm, 191g),無線充電及 USB 3.2 支援 Display Port 更便利,感測器含氣壓計。
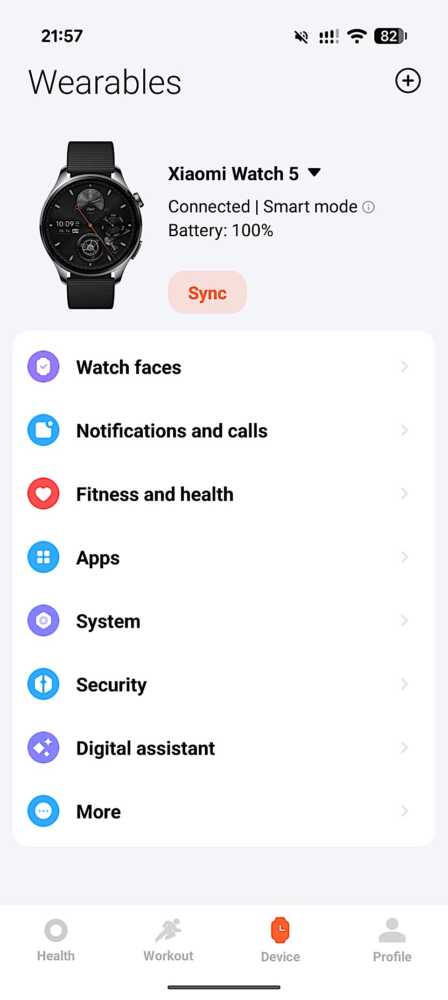
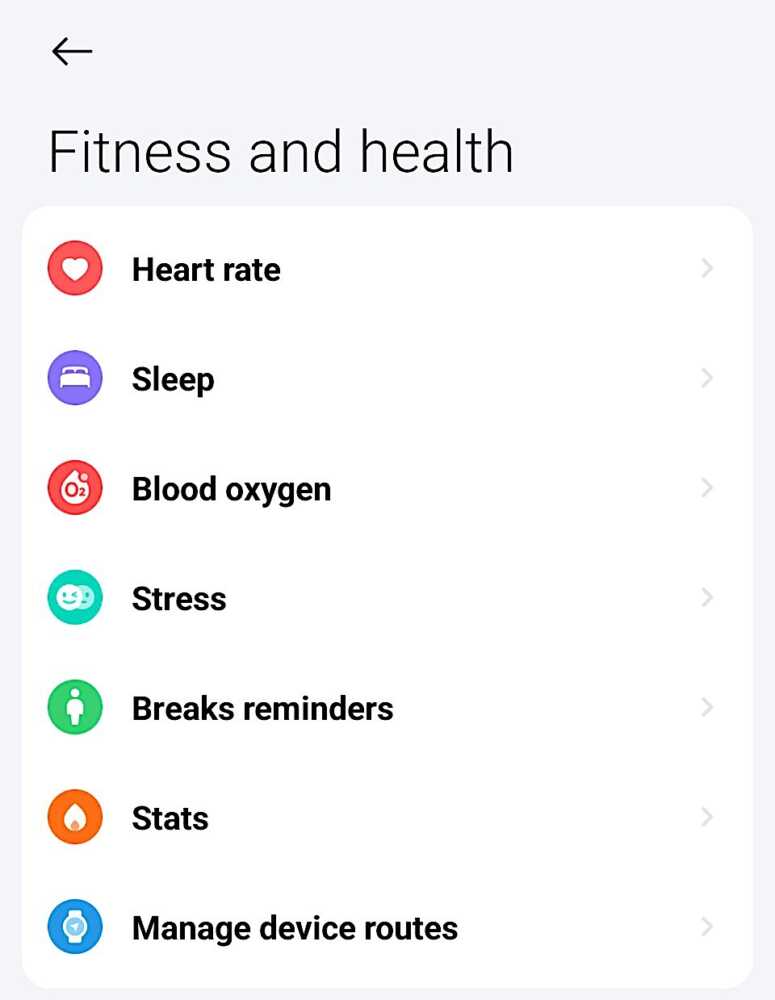
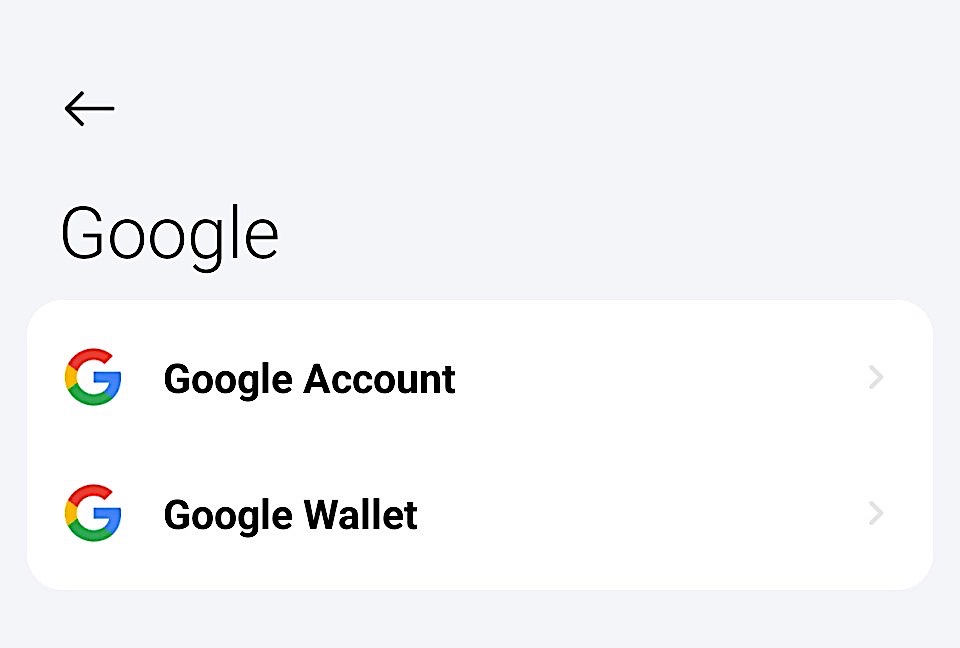
在操作便利性方面,Xiaomi Watch 5 搭載的 Wear OS by Google 系統使得用戶可以輕鬆訪問 Google 錢包、Google 地圖等應用程式,並且支援自訂手勢控制,增加了使用的互動性和便利性。與其他競品相比,Xiaomi Watch 5 在功能的豐富性和操作的直觀性上均有顯著優勢。


 與 honor 500 Pro (中國版):規格表、效能、攝影功能")











 與 Samsung Galaxy Z TriFold:規格表、效能、攝影功能")
 與 ZTE Nubia Fold:規格表、效能、攝影功能")



 與 ZTE nubia Flip3:規格表、效能、攝影功能")



 與 Nothing Phone (3a) Lite:規格表、效能、攝影功能")



 與 OnePlus Ace 6T:規格表、效能、攝影功能")